上一次挖的OAuth2.0坑还没填好,又要开一个操作系统的坑了…
本篇介绍一些简单的进程调度算法,以及它们的代码实现。文章的具体组织为:一些关键概念的介绍 –> 四种进程调度算法(SJF、FCFS、HRRF、HPF)。
话不多说,Let’s go!
一些概念
在对四种调度算法进行介绍之前,有一些概念希望读者能够理解:
- 周转时间:进程完成时间 - 进程到达时间。也就是整个进程从开始到结束所花费的时间。
- 平均周转时间:这个数值一般用于衡量调度的效率。比如在一段时间内来了5个进程,那么在这段时间内这些进程的平均周转时间就是
五个进程的周转时间之和 / 5。- 带权周转时间:某个进程的带权周转时间就是这个进程的
周转时间 / 运行时间。由于系统中总有多个进程在运行,周转时间往往大于运行时间。因此,带权周转时间一般大于等于1。- 平均带权周转时间:多个进程带权周转时间的平均值。
实际上,还有很多指标可以来衡量调度算法的优劣,如CPU利用率、系统吞吐量、响应时间等等。但是本文中介绍的调度算法与时间紧密相连,故此只需要理解以上几个概念,就能够看懂下文对于调度算法的分析。
先来先服务算法(First Come First Serve,FCFS)
先来先服务算法简直是不怎么需要介绍的了。顾名思义,该算法使得CPU优先服务最先到达的进程。生活中充满着先来先服务算法:超市排队、食堂取餐等等。下面用一个例子来模拟这个算法:
假设有五个进程,它们的到达时间和希望的运行时间如下:

进程描述 本着先来先服务的原则,我们在第0秒的时间为进程1服务;在第4秒的时间服务结束,此时进程2、3、5都已到达,但是进程5是最先到的,因而进程5优先受到服务;在第6秒的时间进程5服务结束,此时在等候的进程还有进程2和进程3,为进程3服务,在第16秒的时间服务结束,此时还有进程2和进程4(在第7秒的时候到的),为进程2服务,在第22秒的时候结束进程2,服务进程4,最终在第34秒结束进程4。
CPU对这五个进程的服务次序如下图所示:
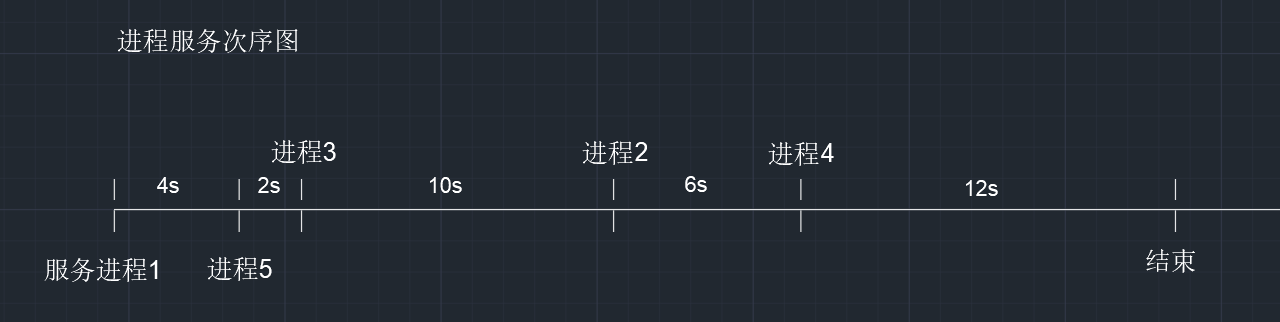
服务次序 如果你还记得第一小节所讲的内容,我们不妨算一下在这个例子中这几个概念分别是多少:
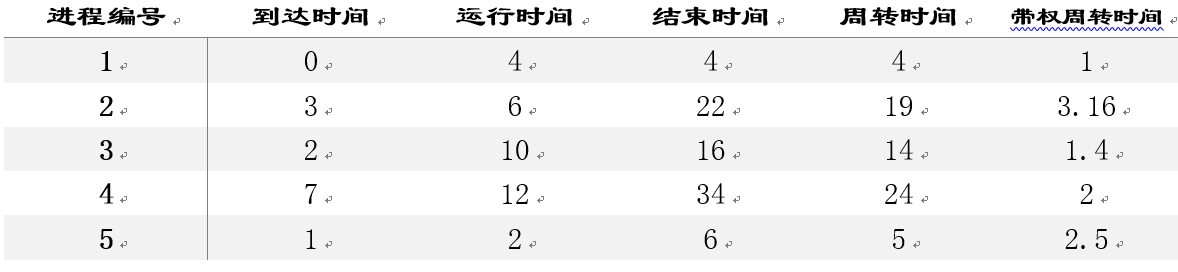
统计时间 你看出其中存在的问题了吗?
短作业优先算法(Shortest Job First,SJF)
先来先服务算法很好理解、在生活中很常见,但是它存在一个问题:对于一些运行时间很短的进程,光是在那边排队等待所花费的时间可能数倍于真正的运行时间!
在上一个例子中,进程2所花费的运行时间只有6秒,但是它很不幸地被进程3抢占先机,只能眼睁睁看着进程3运行了10秒。光是等待的时间就比运行的时间还多!因此,它的带权周转时间也是最大的,现在是否对这个概念的理解深刻了许多?
先来先服务的死板特性对于某些短作业来说简直是灾难,此时,短作业优先算法就显得友好许多。
短作业优先算法不关注进程的到达时间,当CPU结束了一个进程的服务之后,永远从等待的所有进程中找出运行时间最短的进程为其服务。
还是上面的例子,在第0秒的时间为进程1服务,在第4秒的时间进程2、3、5都已到达,此时进程5需要的时间最少,因此它优先受到服务;在第6秒的时间进程5的服务结束了,此时在等候的进程还有2和3,虽然进程3是先到的,但是进程2所需要的时间更少,因此进程2优先受到服务;在第12秒的时候进程2的服务结束了,此时在等候的进程还有3和4,优先为进程3服务,在第22秒的时候为进程4服务,在第34秒的时候结束。
这个例子中,我们的进程2比进程3更晚到达,但是由于它所需要的时间更短,就得到了优先的服务。这就是短作业优先的思想。
如果你没有第一时间看出这个算法的问题,那么请考虑下面这个例子:

新例子 在这里,我们只是把进程4的运行时间由12秒调整为8秒,其他的没有变化。
但是此时,我们在第12秒的时候结束了进程2的服务,此时在等候的还有进程3和进程4,我们优先服务进程4,在第20秒的时候结束它,服务进程3,在第30秒的时候进程3结束。
把数据完善一下,就会发现问题所在:
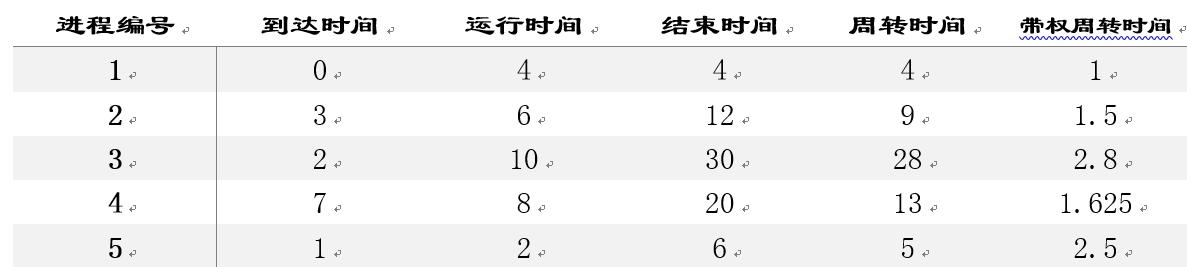
新数据 可怜的进程3,在第2秒到达,在第30秒结束,周转时间高达28秒!
这就是短作业优先的问题——当系统中不断地有短作业到来的时候,很早就在那里等待的长作业就无法得到服务,最终出现进程饥饿。
最高响应比优先算法(Highest Response Ratio First,HRRF)
在短作业优先算法中,进程饥饿是一个比较致命的问题。但是短作业优先的思想确实是有相当的可取之处的,于是人们考虑保留这种思想,同时使得长进程能够较少地受到饥饿,这就有了最高响应比优先算法。
首先,什么是响应比:一个进程的响应比由以下这个公式得到——
RR = (BT + WT) / BT = 1 + WT / BT其中,BT(Burst Time)表示运行时间,WT (Wait Time)表示等待时间。对于一个进程来说,(运行时间+等待时间)除以(运行时间)就是它的响应比。
不难看出,一个进程的运行时间是不变的,而等待时间每时每刻都在变化,因此一个进程的响应比是每时每刻都在变化的。
对于
RR = 1 + WT / BT,显然每个进程的初始响应比都是1,因为刚刚到达的时候没有等待时间;随着等待时间的变长,进程的响应比不断地变大,它受到调度进入CPU的概率也就变大了。HRRF算法还有一个优点:它保留了短作业优先的原则。也就是说,对于同时到达的任务,虽然大家的响应比都是1,但是短作业优先,而长作业需要随着等待时间的增加慢慢地提高自己的响应比,最终接受调度。
还是考虑第三小节的例子:
新例子 在第0秒的时间,进程1到达,在第4秒的时间结束服务,此时进程2/3/5已经到达,计算它们的响应比:

第四秒响应比 可见,此时进程5已经等待很久了,需要让它接受服务。
进程5运行2秒,在第6秒的时间结束,此时还有进程2/3在等待,计算它们的响应比:

第六秒响应比 可见,进程2的响应比还是高一些,让它接受服务。
在第12秒的时候进程2结束,此时进程3和进程4在等待,计算它们的响应比:

第十二秒响应比 此时让进程3接受服务,在第22秒的时候结束,进程4进入,在第30秒的时候结束。
老规矩,计算数值:

新数据 相比于SJF算法,这个算法使得长进程3免于饥饿,是一个比较暖心的做法。
这个算法唯一的问题,就是我们需要每时每刻地计算各个进程的响应比,同时需要把它们的响应比存入内存的某个空间中;增加了计算,增加了开销。
最高优先数优先(Highest Priority First,HPF)
最高优先数优先算法不关注进程的各种时间,而根据进程的**优先数(又称优先级)**进行调度。这个算法要求每个进程都要具备一个优先级,这个优先级可以是静态的,也可以是动态的。静态优先级在进程创建的时候分配,在进程生存周期内保持不变;动态优先级允许在进程生存期内被修改。
实际上,之前的几种算法可以看做是这个算法的特例:比如短作业优先算法,进程的优先级可以看成是与运行时间成反比的一个数,即进程运行时间越短,优先级越高,因而越短的进程越先得到调度。
在这个算法中,我们要引入两个概念:剥夺和非剥夺(又称抢占和非抢占)。
*剥夺(抢占)*指的是在一个进程到达的时候,若当前运行的进程优先级小于自己,则它可以抢占当前进程的CPU,而被抢占的进程就会进入就绪队列,等待下一轮调度。
*非剥夺(非抢占)*的调度方式就是指无论到达的进程优先级多高,都要等待当前进程运行完成(或者分配给它的时间用完),才能进入调度。
以看病为例,抢占的看病方式就是你正在被医生诊断,此时突然来了急诊,医生就把你扔下,先去抢救伤员了;而非抢占的方式就是医生一定要把你诊断完成,再去抢救伤员。
例子听起来比较离谱。这两种方式实际上各有优点,读者可以自行体会。
回到正题,我们先考虑抢占方式下的HPF算法,首先为上面的例子中的几个进程引入优先级:
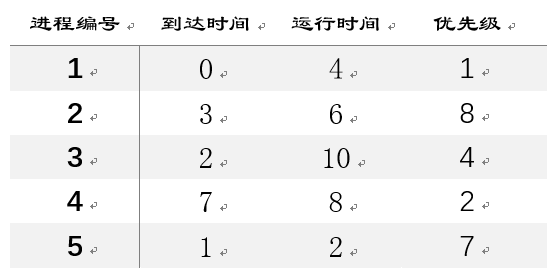
新例子 在第0秒的时候,进程1到达,开始为其服务;
在第1秒的时候,进程5到达,由于进程5的优先级高于进程1,此时将暂停进程1的服务,转为服务进程5,记住此时进程1还需要运行3秒的时间;
在第2秒的时候,进程3到达,由于进程3的优先级低于进程5,CPU继续服务进程5;
在第3秒的时候,进程5运行结束,此时进程2到达,现在等待的进程有1/2/3,由于进程2的优先级最高,系统为其服务;
在第7秒的时候进程4到达,不会打断进程2;
在第9秒的时候,进程2结束,此时等待的进程有1/3/4,由于进程3的优先级最高,系统为其服务;
在第19秒的时候,进程3结束,此时等待的进程有1/4,由于进程4的优先级更高,系统为其服务;
在第27秒的时候,进程4结束,此时为进程1服务,完成剩下的3秒时间,在第30秒结束。

抢占式HPF 在这个例子中,进程1最先到达,最晚结束,简直惨兮兮;但是我们首次看到了两个带权周转时间为1的情况,表明这个调度方式在优先级设置合理的条件下,效率还是不错的。
对于非抢占式调度,上面三个小节已经讲了太多,在此不加赘述。
小结
本文介绍了四种调度算法,并以几个简单的例子具体模拟了它们的运行模式。本来还希望附上这几个算法的代码实现,但篇幅有限,只好新开一篇。
如果你认为我有哪些地方没有讲清楚,或者有哪些错误之处,欢迎评论区留言告诉我。(ノ ̄▽ ̄)